The MMS Mobile Mapping System is an Autonomous vehicle-mounted 3D measurement system developed for high accuracy, by Mitsubishi Electric Corporation.
It is made from equipment including global positioning system (GPS), laser scanners and cameras mounted on a vehicle. The MMS can efficiently acquire precise 3D position data including buildings, road shape, signs/marking, guardrails, characters printed on roads, manholes, and area surrounding the road while driving.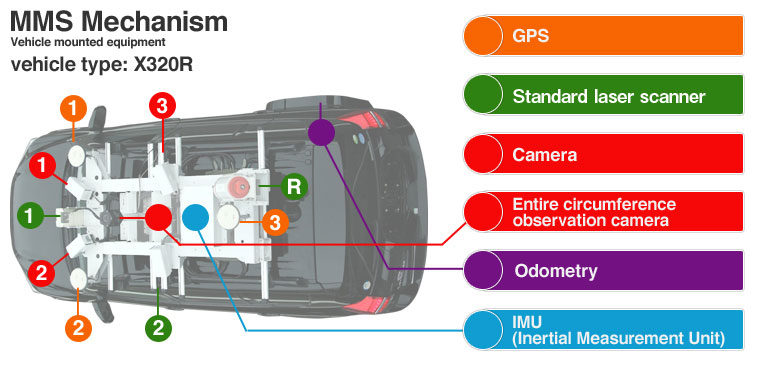
GPS: Self-positioning accuracy within 0.06 m (rms)
Consists of 3 vehicle-mounted units. * Assumes GPS reception environment is favorable.
Standard laser scanner: No. of points per second per unit: 13,757 points/sec (27,100 points/sec for K320)
Viewing angle: 180°, Range: 30 m (65 m for K320)
Camera: No. of pixels: 5 million
Viewing angle per unit in horizontal direction: 80°
64° in vertical direction, max. No. of images: 10 images per second
Entire circumference observation camera
Odometry: Error of ± 1 m when traveling 1 km continuously without GPS reception
* Provided as reference only; depends on driving conditions.
* High-accuracy mapping under bridges is made possible by utilizing land map update function.
IMU:(Inertial Measurement Unit)
Long distance laser 300,000 laser points per second at 200 m (max. 50,000 points/sec at 500 m); viewing angle of 360°, range of 500 m
Click Here for further information